국립금오공과대학교 소프트웨어공학과 학·석사 연계과정생 이제민, 김정현 학생이 공동 제1저자로 참여한 논문이 CS 분야 국제학술대회인 ACM VRST 2025(ACM Symposium on Virtual Reality Software and Technology)에 채택되어 11월 학술대회에서 발표될 예정이다.
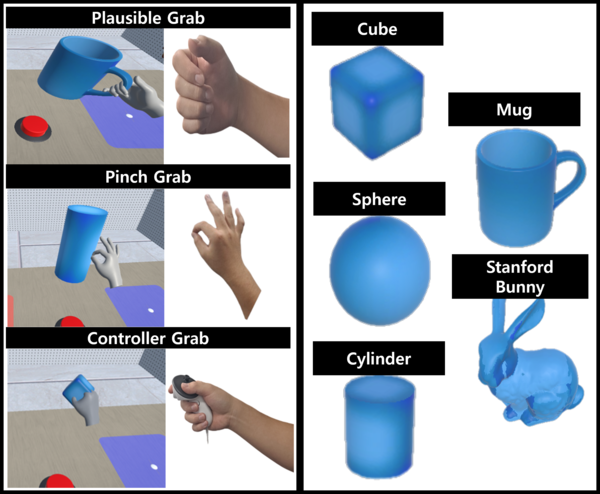
논문 제목은 ‘Trade-offs in Virtual Grasping: The Interplay of Interaction Fidelity and Object Affordance’로, VR 환경에서 컨트롤러, 핀치, 사실적 제스처 기반 객체 파지 방식을 비교·분석하고, 객체 형태와 크기(어포던스)가 사용자 경험에 미치는 영향을 규명한 연구다.
연구에서 두 학생은 다양한 형태(큐브, 구, 원통, 머그컵, 복잡 모델)와 세 가지 크기(5cm, 7cm, 10cm)의 객체를 대상으로 세 가지 파지 방식을 비교했다. 그 결과, 컨트롤러 방식은 가장 빠르고 정확하며 인지적 부담을 최소화했으며, 사실적 제스처 방식은 몰입감과 존재감을 높였지만 속도와 정확도에서 한계를 보였다. 핀치 방식은 두 방식의 중간 수준 성능을 보였고, 특히 작은 객체를 다룰 때 안정적이었다.
이번 연구는 VR 및 메타버스 환경에서 객체 조작의 정확성과 몰입감을 동시에 높이는 실용적 가이드라인을 제시한다. 연구에 참여한 학생들은 “상황에 따라 어떤 파지 방식이 효율적인지 분석했다는 점에서 실용적 가치가 크다”며 향후 다양한 가상 환경에서 기술 활용 가능성을 강조했다.
지도 교수 김영원 교수는 “이번 연구는 실제 사용자가 다양한 형태와 크기의 객체를 효율적으로 파지할 수 있는 방식을 정량적으로 분석하고 실험적으로 검증했다는 점에서 의미가 크다”며, “Physical AI, 휴머노이드 텔러오퍼레이션, 스마트글래스 환경 등에서 효과적인 인터랙션 설계를 위한 실질적 기준을 제공할 것”이라고 평가했다.
이번 연구는 국립금오공대 컴퓨터공학부 소프트웨어전공 ‘확장현실 및 메타버스 연구실(Extended Reality & Metaverse Lab, 지도교수 김영원)’ 주도로 진행됐으며, 한국지능정보사회진흥원(NIA)의 2025년 초거대 AI 클라우드팜 실증 및 AI 확산환경 조성사업, 구미시 및 경상북도의 지원을 받아 수행됐다.