서울과학기술대학교는 화공생명공학과 윤현식 교수 연구팀의 연구 성과가 국제학술지 Science Advances에 게재됐다고 24일 밝혔다. 논문 제목은 「Starfish-Inspired Tube Feet for Temporary and Switchable Underwater Adhesion and Transportation」으로, 불가사리의 관족에서 착안한 수중 접착 로봇 개발에 관한 연구다.
윤 교수팀은 미국 펜실베이니아대학교(University of Pennsylvania)의 접착 전문가 Kevin Turner 교수, 재료공학 석학 Shu Yang 교수와의 국제공동연구를 통해 수중에서도 강하게 접착하고 외부 자극에 따라 쉽게 탈착되는 ‘인공 관족(artificial tube foot)’을 개발했다.
이번 연구는 말랑하고 유연한 소재를 활용해 복잡한 환경에서도 안정적으로 작동하는 소프트 로보틱스 기술의 한계였던 수중 접착 문제를 해결하고자 기획됐다. 기존의 접착 방식은 마른 환경에 최적화돼 있어 물속에서는 성능이 급격히 저하되는 단점이 있었다.
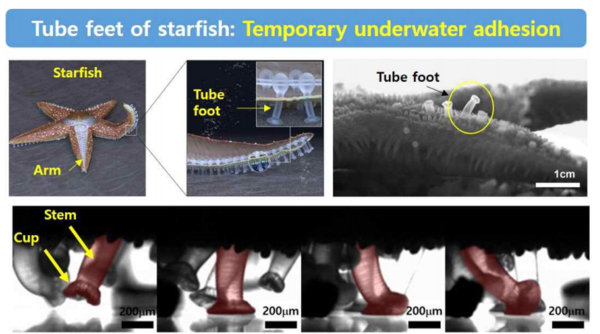
연구팀은 불가사리의 관족이 환경에 따라 형태를 바꾸며 바위에 부착하거나 모래를 파고드는 생물학적 메커니즘에 주목했다. 이를 모사해, 상·하부로 서로 다른 고분자 소재를 사용한 실린더를 직렬로 결합하는 구조를 고안했다. 상부 실린더는 수분에 반응해 부풀어 오르는 하이드로젤로 구성되어 있고, 하부는 팽윤성이 낮은 고분자 소재로 설계됐다. 이 구조를 통해 수중에서 상부가 컵 형태로 변형되며 표면에 밀착되는 새로운 접착 메커니즘이 구현됐다.
특히 이번에 개발된 인공 관족은 열, 공기압, 전단력, 빛 등 다양한 외부 자극에 반응해 빠르게 탈착할 수 있는 ‘멀티모달’ 시스템이다. 이는 단일 자극에 의존하던 기존 기술 대비 응용성과 조작성이 크게 향상된 것이다.
서울과기대는 이번 연구를 통해 차세대 소프트 로봇의 실용화 가능성을 크게 높였다고 평가했다. 복잡한 가공 없이도 높은 성능을 구현할 수 있어 산업적 대면적 생산과 상용화 가능성이 크며, 마이크로 LED 전사 로봇 등 정밀 응용에도 적합하다.
이번 연구는 한국연구재단 중견연구자지원사업 및 중점연구소 사업의 지원을 받아 수행됐다.